|
The
|
Kits are not
available for this article . . .
A linear actuator is used in:
Solar Tracker-1
Linear motion is used to generate electricity
in:
Shake Tic Tac LED Torch
![]()
There are many ways to achieve motion, from linear motors, pancake
motors and even micro-motors the size of a pinhead.
A linear motor is the name given to the motor found on a mono-rail
train. It has no wheels and the train is lifted above the track via magnetic
repulsion - also called levitation.
A linear motor (linear accelerator) can also be found on a coil-gun to
accelerate the projectile as shown in this animation:
There are a number of ways to achieve linear motion. The following
diagrams show some of the ways to get linear motion:
Using a crank:
Using a rack and pinion:
A pancake motor is found in car door winders where the space is limited
to a very flat type of motor. They are also used in computers to rotate
CD's and hard discs. They also have the name "stepper motor."
Here is a recent invention called a "Gemini Electric Motor." It
uses both ends of an electromagnet to produce more torque than a
conventional motor. It is also called a pancake motor as it can be made
very flat.

Here is a stepper motor turning a threaded rod to move an arm forward
and back for the pick-up head of a disc drive:
Here is a micro motor driving a set of gears (called a train of geasrs) to operate a slide pot:

A micro motor driving a gearbox:

This motor and gearbox can be purchased from BG Micro for $6.00:
http://www.bgmicro.com/robotmotor.aspx
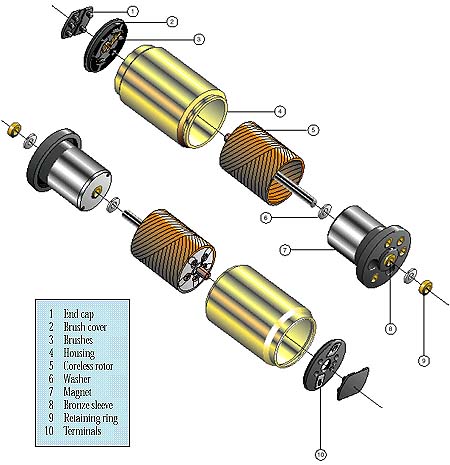
Here is a cut-away view of the construction of a micro motor. It is hard
to see the actual design but the armature consists of 3 coils of wire
wound nearly over each other and dipped in resin to seal them and make
them stiff. This hollow tube of windings is then placed over a magnet
and is free to spin over the magnet. Normally the magnets of a 3-pole
motor are on the outside. For this motor, the magnet is in the middle.
This is a much-better idea as the torque that comes from the coil is at
the greatest distance from the shaft and the motor is no larger than the
coil itself. This is a brilliant concept.
The ends of the coils are terminated at a flat-looking commutator
exactly like the normal commutator for a 3-pole motor but on a disk to
take up less space.
There are also
dozens of other types of specialised motors, designed for low RPM, high
torque, (such as a starter motor in a car), constant speed (such as a
clock motor) and many other requirements.
But sometimes linear motion needs to be produced via some other means
and a solenoid will produce this. This
is the main topic of this discussion.
There are lots of problems with producing motion via a solenoid as this
type of activation is both inefficient and difficult to control.
It is difficult to control the speed with which the motion occurs and
the operation requires more energy than using a motor and threaded rod or
a crank,
for example.
But a solenoid is low-cost and can be very compact and thus it has a
number of applications.
For the hobbyist, it is most difficult to get the components as
very few devices are available and nothing has reached the
second-hand market.
Thus we have to be very enterprising and keep on the "look-out."
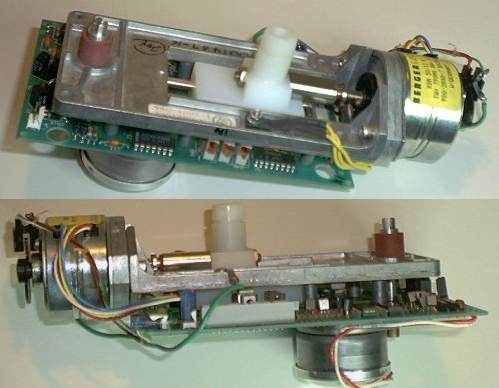
Recently, the author found a small solenoid in a birthday card. It
activated an arm and this moved a cartoon character to produce
animation.
Some toy cars also have a rotational activator to produce steering to
the front wheels. This is called a "rotary solenoid" or "rotary
actuator."
A solenoid can provide a force in both the push and pull direction,
simply by reversing the polarity of the supply.
This is just like the forward and reverse direction of a motor.
The other fact to remember is the strength of the "pull" or "push."
When the core is fully outside the winding the pull is very
small. As the core is brought into the winding, the pull increases, even
though the current flow does not change. This is because the core
interacts with more of the flux.
When the core is fully contained within the winding, the pull decreases
to zero.
Thus the movement (or throw, or activation) is within these two limits
and the strength of the pull increases to a maximum at the middle of the
"throw" and decreases to zero at the end of the throw.
The force or pull, provided by a solenoid is determined by the number of
turns on the winding, the current flowing and the core material.
If the core is a strong permanent magnet, the solenoid will operate in
both a push and pull direction.
If the core is soft-iron, the solenoid will operate on AC and provide
either a push or pull force and the core must be returned to its
original position via gravity or a spring. For an AC actuator, the core
will pull into the winding when power is applied.
Using a solenoid:
The simplest solenoid has a few hundred turns wound on a cardboard tube
and connected to a battery.
If a nail is placed near the end of the solenoid and the battery is
connected, the nail will jump up into the winding and remain there.
This is where the "pull" on the nail is zero (actually where the push
and pull forces are equal) and if the nail is moved to either end of the
winding, it will be returned to the centre by the magnetic force
produced by the current through the winding. When the supply is removed,
the nail will fall.
These are the basics you need to know when designing an actuator.
The actual pull delivered by an actuator depends on many things and one
of the
variables is the number of turns.
Increasing the number of turns will increase the "pull," but this will
increase the resistance of the winding and thus less current will flow,
if the voltage remains constant.
Thus, to increase the "pull," the thickness of the wire must be
increased so the resistance of the winding does not increase and
you can take advantage of the extra turns.
If the core is a magnet, the strength of the "pull" will depend on the
strength of the magnet and how tightly it fits down the centre of the
winding.
Rather than provide lots of formulae and winding details, it is best to
buy a ready-made solenoid and see how it performs.
One of the smallest solenoids is available in a birthday card. It is
activated by a chip (actually a Chip On Board - COB module) using driver
transistors. It pushes and pulls a cartoon character to provide the
effect of dancing, while the chip produces music at the same time.
Driving a solenoid is not easy, especially if you want to drive it in
push-pull mode.
The basic circuit is called an "H-Bridge."
Solar Tracker-1
employs an H-bridge to drive a motor forward and reverse. The motor can
be replaced with a solenoid.
Using Nitinol wire:
Linear motion can also be obtained by heating a special type of wire
that contracts (shortens) when current is passed through it. This is called "Nitinol"
or " Memory wire" or See our article on Nitinol wire:
http://www.talkingelectronics.com/projects/Nitinol/Nitinol-1.html
DEFINITIONS
TRAVEL.
This is the distance you want something moved.
You may need to move something in a straight line or rotate something.
Examples such as moving something to reach another item or push an
object a certain distance or rotate something such as a door or gate.
When an item is being rotated, or moved through an arc, the actuator is
attached to the gate etc at a point near the hinge and the gate is moved
from the closed to open position. The TRAVEL is then determined.
The actuator must provide this TRAVEL. This is the distance from the
"closed" to "open" position of the actuator. If the actuator will not
provide this amount of travel, a position closer to the hinge of the
gate is selected.
As you move closer to the hinge, the effort required to move the gate is
increased.
The EFFORT, or STRENGTH, or FORCE or of the actuator.
The strength of an actuator is measured in gm-cm, or foot-pounds. This
means it will push or pull a certain number of grams a certain number of
centimetres. It is not GRAMS PER CM, but grams multiplied by
centimetres.
When working out the effort to open or close a gate, you need to take
into account the fact that the "pull" required will be much greater at
one end of the activation. To make yourself aware of this, take a length
of cotton, tie it to the gate and pull the gate open.
You will
find it takes a strong "pulling-force" to get the gate to move initially
and the cotton may break. This is where the greatest force is required.
SPEED of ACTIVATION
You may need to perform a certain action in a certain number of
seconds.
This is called the SPEED of ACTIVATION. This must also be taken into
account in some applications.
If you cannot get the required distance or force, an actuator can be
connected to a LEVER.
A lever can increase or decrease the TRAVEL or FORCE of an actuator.
There are three types of LEVERS called "Classes of Levers."
Class-1 Lever
Class-1 is the "see-saw" with the fulcrum between the load and the
effort. There is no mechanical advantage with this class of lever. It is
purely to create movement at a distance from the actuator (or create
push instead of pull).
Levers can be used to a great advantage with actuators. They can create
the exact amount of travel required or increase the force.
11-7-2010
Class-2 Lever
Class-2 lever, such as a "wheelbarrow" always has a mechanical advantage
greater than 1. The actuator can move a larger load but the travel is
not as far.
Class-3 Lever
Class-3 lever has a mechanical advantage less than 1. The force required
to move the
load is greater, but the load moves a greater distance than
the actuator.
(Note: the fulcrum must be "pinned" for this diagram to work)
Unfortunately, you cannot increase both the force and distance at the
same time. If you increase the distance, the load cannot be as large.
Levers can also increase or decrease the speed of movement.
Simply playing with sticks and pins or Lego will help you understand the
type of lever you require.
In general, linear actuators are expensive to purchase and have a high
rate of wear. They are also expensive to operate.
For this reason you must determine if the application can be done with
some other form of activation.
In recent times, a lot of different types of actuators have come on the
market and there is a wide range to chose from.
This has just been a starting point to help you decide if a solenoid is
the best way to produce linear motion.