WALKING
ROBOT
Page 10
Circuits for a Walking Robot
To search more than 40 BEAM sites, click BEAM ONLINE.
In this section we show how to connect a 4 Nv MicroCore circuit
to two motors via a 74HC245 octal buffer chip.
This is not a project with a kit. It is
a Feature Article with references to sites on the web. You will need to
go to hobby supply shops for the components - especially the hardware items and
motors. Try the LINKS
page of BEAM ONLINE for suppliers.
The circuit has been taken from Chiu-Yuan Fang's
excellent
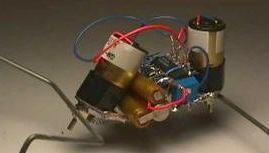
site. On it he has produced a BEAM Robot called "Walker" and has a number of photographs
to show how it has been put together.
The following are thumbnails of some of these shots:
|
|
 |
|
|
Front view of Walker |
Side view of Walker |
|
 |
 |
|
|
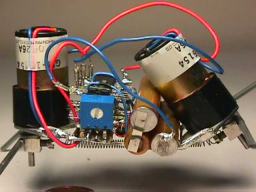
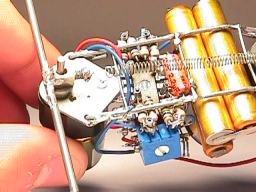
The electronics, batteries and motors |
The underside |

View 2 more pages of the excellent pictures of Chiu-Yuan Fang's Walker Version 2:
Page-1 photos and Page-2
photos
The circuit diagram for the Walker is shown below. The diagram has been laid out to show how the signal
progresses though the circuit. It circulates around the four Schmitt
trigger gates, while at the same time driving two motors, in either forward or
reverse direction. The circuit turns on with a long delay via the gate between
pins 1&2. Two 1M trim-pots provide "straight-line"
motion.
The 74HC245 octal buffer (driver) chip has a 50mA capability per output and
two outputs are joined in parallel in the diagram above to get 100mA per line. If you
require more current, the following transistor H-Bridge can be used:
The circuit above will provide up to about 500mA drive-current for each motor and this is needed when a motor has to be started under load. As soon as the motor "starts", the current will drop, but it's the ability of the circuit to provide a high starting-current that prevents a "stalled condition." The LEDs provide indicators to show the operation of the circuit.