|
STEPPER MOTOR CONTROLLER |
|
|
This project controls a UNI-POLAR stepper motor in full and half-step increments.
Stepper Motor Controller
built on Experimenter PC board
THE STEPPER MOTOR
There
are a number of stepper motors on the market and it takes a little bit
of understanding to know how they work. The main difference is
the number of coils and the way they are connected but there are also
points to know to get the maximum torque .

A STEPPER MOTOR
A stepper motor consists
of a number of stationary coils and these are turned on and pull a
rotary magnet towards the coil. This action turns a shaft.
But you must turn the coils on and off at the right moment to create
rotary movement.
This requires an external circuit consisting of pulses and these pulses
must contain voltage and current to deliver energy to the stepper motor.
To understand how a stepper motor works, you just need to know the fact
that a coil will attract a magnet when a current flows and it will repel
the magnet when the current flows in the opposite direction.
In the following animation you can see an armature (rotor) being pulled
around by turning on one or more coils.
Note that 8 steps can be created with 4 coils by turning them on individually or in pairs:
Here is another diagram to show how the rotor is moved by half-step intervals:
UNIPOLAR
ANIMATION
The following animation shows a 6
wire stepper motor. It can be converted to a 5-wire stepper motor by
connecting the two centre taps together to the positive supply. The two
ends of each winding are alternately grounded to reverse the direction
of the field provided by that winding.
The cross section shown is a 30 degree per step motor. Motor
winding number 1 is distributed between the top and bottom stator pole,
while motor winding number 2 is distributed between the left and right
motor poles. The rotor is a permanent magnet with 6 poles, 3 south and 3
north, arranged around its circumference.
As shown in the figure, the current flowing from the center tap of
winding 1 to terminal "a" causes the top stator pole to be a north pole
while the bottom stator pole is a south pole. This attracts the rotor
into the position shown. If the power to winding 1 is removed and
winding 2 is energised, the rotor will turn 30 degrees, or one step.
By turning on two windings during part of the cycle, a half-step
can be introduced. This is shown in the animation.
It takes three complete cycles of the control system to turn this 6-pole
rotor one revolution.
HALF
STEPPING
With half stepping, the drive alternates between two phases ON and a
single phase ON. This increases the angular resolution, but the motor
also has less torque (approx 70%) at the half step position (where only
a single phase is on). This can be increased by increasing the current
in the active winding. Half-stepping increases the
accuracy of the output. This is what we have done in this project.
To keep the theory simple, we are not going into the waveforms needed
to produce rotation, however we need to explain how the coils are
connected as some motors have 5, 6 or 8 leads (wires).
4-wire stepper motors:
This type of motor has only one winding per stator pole.
This is called a
Unifilar winding (uni - meaning one). As we mentioned above, the winding
must see reverse voltage to produce rotation and this type of motor is
not covered in this project.
6-wire stepper motors:
6-wire stepper motors have two identical sets of windings on each stator pole. This is called bifilar winding and this type of winding configuration simplifies operation in that delivering current from one coil then another, wound in the opposite direction, will reverse the rotation of the motor shaft. Whereas, in a unifilar application, to change direction requires reversing the current in the same winding, as mentioned above.
5-wire stepper motors:
5-wire stepper motors simply have the centre-tap of each winding connected inside the motor or on a terminal-block.
8-wire stepper motors:
8-wire stepper motors simply have the wires from the two
coils brought out separately. This arrangement offers the flexibility of
either a series or parallel connection. But this will bring it to a
4-wire device and require voltage reversal to produce rotation.
You can also search the web for details on connecting the windings for high torque
but this is beyond the scope of this article.
The type of stepper motor we will be covering are
5, 6 or 8-lead Unipolar stepper motors.
UNIPOLAR AND BIPOLAR STEPPER MOTORS
A Unipolar Stepper Motor has two windings per phase, one for each direction of magnetic field. You can remember the word "Uni" means only one direction of current is needed for this type of motor. This is the type we use in this project.
A Bipolar Stepper Motor has a single winding per phase. The current in a winding needs to be reversed (thus the prefix "Bi" ) in order to reverse a magnetic pole, so the driving circuit must be more complicated, typically with an H-bridge arrangement.
The following diagrams show how to connect these stepper motors:
Here are 3 UNIPOLAR Motors that can be wired and used in this project:

Convert 6-Lead 5-Lead and 8-Lead Unipolar motors by following the
diagram above.
BIFILAR STEPPER MOTORS
To use a bifilar motor as a unipolar motor, the two wires of each
winding are connected in series and the point of connection is used as a
center-tap.
IDENTIFYING STEPPER MOTOR WIRES
If you do not have a schematic diagram for your stepper motor - for
example if it was salvaged from an old printer - it is very easy to work
out the wiring.
Bifilar windings on a stepper motor are applied to the same rotor and
stator geometry as a bipolar motor, but instead of winding each coil in
the stator with a single wire, two wires are wound in parallel with each
other. As a result, the motor has 8 wires, not four.
In practice, motors with bifilar windings are always powered as either
unipolar or bipolar motors.
To use a bifilar motor as a bipolar motor, the two wires of each winding
are connected either in parallel or in series. With parallel connection,
this allows low voltage high-current operation. With series connection,
if the center tap is ignored, this allows operation at a higher voltage
and lower current than would be used with the windings in parallel.
Essentially all 6-wire motors sold for bipolar use are actually wound
using bifilar windings. Any unipolar motor may be used as a bipolar
motor at twice the rated voltage and half the rated current on the
nameplate.
Most
stepper motors have
6 wires, however there are some with 4, 5, or
8 wires. Each of the four coils is made up of one length of wire
with two ends. One end is called live and
the other end is called common.
In a five-wire stepper motor all four commons
are joined together, in a six-wire stepper motor two pairs of common wires are joined together,
and in an eight-wire stepper motor none of the four common wires
are joined together.
The following diagrams show how the coils are connected:
Use a multimeter to measure the resistance of each coil. All four coils
will have identical resistance. If they did not, the motor would not
function properly. The resistance may be 100 ohms. If a pair of wires
measures 200 ohms, you are measuring between two live ends. In other
words, you are measuring the resistance of TWO COILS.
If you have a 5 wire stepper motor, it will be very easy to find the
common wire as every other wires will have a resistance of 100 ohms.
For the 6 wire stepper motor, you will have 3 wires with resistance
values and another 3 wires with resistance values. The two wires with
200 ohms resistance between them, are "live," so the other wire is
"common."
Once you have identified the "common" wire(s), you need to find the
correct "phases." This is another way of saying the correct way to
connect the motor so that it rotates clockwise of anticlockwise.
You cannot simply connect the "live" wires to the project in any order.
They must be connected so that the pulses will create a rotating
magnetic field.
There is no way to determine the correct way to connect a stepper motor
other than viewing the output on a 4-input CRO.
So, we have to do it by trial-and-error.
Connect the stepper motor in any arrangement to the project but make
sure the common goes to the positive rail, as we have already identified
this wire.
Turn on the project and see if the stepper motor rotates.
If not, do not touch the first wire. Simply swap the last two wires. If
this does not work, swap the 2nd and fourth wires. Then the second and
third wires.
The motor will not be damaged during this process as it does not take
any more current when oscillating back and forth or when rotating.
keep swapping the last three wires until the motor rotates.
PWM
To make a stepper motor rotate at the fastest RPM, we deliver a
pulse of very short duration, to each of the poles and the order of
delivering these pulses must be correct.
If we try to increase the RPM, we need to make the pulse shorter in
duration and a point will come when the stepper motor HALTS or STOPS or
FREEZES.
We now know the maximum RPM.
To decrease the RPM, we increase the length of each pulse and this
produces less pulses per second. The RPM decreases.
In all of this action, the stepper motor is taking almost the same
current as the voltage is being supplied almost constantly, the
only difference is the pulses are longer or shorter.
But suppose you want to supply less current or supply the stepper motor
with a higher voltage.
This can be done by delivering a short pulse then turning off the supply
for a short period of time between pulses.
This will not alter the RPM under the following conditions: Suppose the
minimum pulse-width is 5mS. Suppose the pulse-width is presently 25mS.
If the pulse-width is reduced to 5mS and an off-period of 20mS, the
stepper motor will retain the same RPM but consume less current.
The torque will also be reduced and this will have be checked - to see
if the motor stalls under load.
This action is called "reducing-the-pulse-width" and is commonly called
PULSE WIDTH MODULATION.
This is called "driving the motor with PWM."
You can also use PWM to drive a 12v stepper motor from 24v or 36v.
By using the example above, the stepper motor is only getting a pulse of
energy for 20% of the time, so that delivering a voltage such as 24v or
36v, will result in an average current that is less than driving it
without PWM on 12v.
These are the main reasons for using PWM. It is not used to control the
RPM.
STEPPER MOTOR VOLTAGE
You can find stepper motors in all types of consumer electronics,
including printers, video players, plotters and the head positioning motors from old diskette drives.
Most of these stepper motors are 12v.
However few of them are identified with the operating voltage and the
simplest way to test them is to connect to 12v and read the current.
Current consumption from 50mA to 300mA is quite common and since they
are generally used for very short periods of time, they will not get hot
or even warm.
If you want to use them on a higher voltage, such as 24v or 36v, you
will need to drive them with very short pulses and provide an off-period
in the waveform so that the overall current is not above about 300mA.
This involves a pulse-width technique called PWM, mentioned above.
This can be incorporated into the project by modifying the program.
|
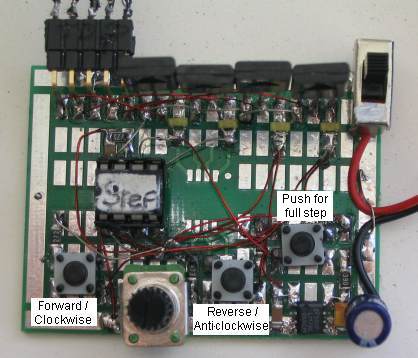
INSTRUCTIONS FOR
USE Turn the project ON and push the left button very quickly. The stepper motor will increment a half-step. Keep the button pressed and the stepper motor will rotate clockwise. Push the right button very quickly. The stepper motor will increment a half-step. Keep the button pressed and the stepper motor will rotate anti-clockwise. Push the top button. The project now goes to full-step mode. Push the left button and the stepper motor rotates clockwise in full-step mode. Turn the pot to increase or decrease RPM. Turn the project off. Push the top button. The project now goes to full-step mode. Push the right button and the stepper motor rotates anti-clockwise in full-step mode. Turn the pot to increase or decrease RPM. |
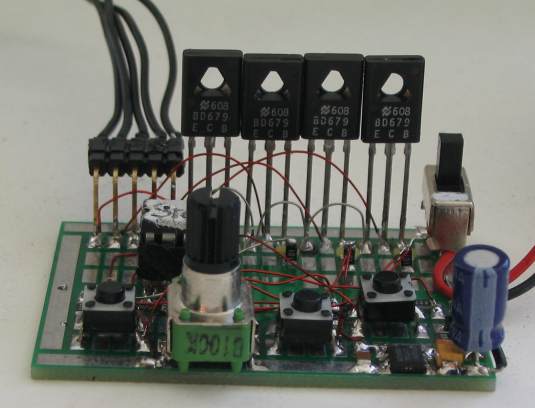
CONSTRUCTION
Stepper Motor Controller
16/11/2010
You can build the circuit on any
type of Proto board. We have chosen our surface-mount board as it makes
a neat project and you can see all the wiring at the same time.
The
PROGRAM
If you want to modify the program you will need a programmer, a board to
hold the 8 pin chip during programming and an adapter to connect between
the programmer and PC board.
These are
covered in our article "Pick-A-PIC."
Here are the files you will need for "burning" your chip and/or
modifying the program:
Step.asm
Step.txt
Step.hex
The following program is for viewing. It may contain
spaces or hidden characters that will not compile correctly to produce a
.hex file. Use the .hex file above to burn your chip or the .asm file to
modify the program.
;*******************************
;Stepper.asm
;drives a Stepper motor forward and reverse
;13-11-2010
;*******************************
list p=12F629
radix dec
include "p12f629.inc"
errorlevel -302 ; Don't complain about BANK 1 registers
__CONFIG _MCLRE_OFF & _CP_OFF
& _WDT_OFF & _INTRC_OSC_NOCLKOUT ;Internal osc.
;_MCLRE_OFF - master clear must be off for gp3 as input pin
;******************************
; variables - names and files
;*****************************
temp1 equ 20h ;
temp2 equ 21h ;
Sw_Flag equ 25h ;switch flag for "inching"
loops equ 26h ;loops for full stepping
count equ 27h ;loops of discharge time for 100n
PotValue equ 28h ;value of pot
look equ 29h ;look for pot value every 100 loops
;***************************
;Equates
;***************************
status equ 0x03
rp1 equ 0x06
rp0 equ 0x05
GPIO equ 0x05
status equ 03h
option_reg equ 81h
; bits on GPIO
pin7 equ 0 ;GP0 100k speed pot
pin6 equ 1 ;GP1 output1 to stepper motor
pin5 equ 2 ;GP2 output2 to stepper motor
pin4 equ 3 ;GP3 Input from buttons
pin3 equ 4 ;GP4 output3 to stepper motor
pin2 equ 5 ;GP5 output4 to stepper motor
;bits
rp0 equ 5 ;bit 5 of the status register
;**********************
;Beginning of program
;**********************
org 0x00
nop
nop
nop
nop
nop
SetUp bsf status, rp0 ;Bank 1
movlw b'11001000' ;Set TRIS GP1,2,4,5 out GP3 input
movwf TRISIO
bcf status, rp0 ;bank 0
movlw 07h ;turn off Comparator ports
movwf CMCON ;must be placed in bank 0
clrf GPIO ;Clear GPIO of junk
clrf Sw_Flag
incf Sw_Flag,1 ;put a bit onto Sw_Flag
goto Main
;****************
;delays *
;****************
_uS movlw 08Ch
movwf temp1
decfsz temp1,f
goto $-1
retlw 00
;delay for pulsing servo anticlockwise
acw
movlw 60h
movwf temp1
decfsz temp1,f
goto $-1
retlw 00
_1mS nop
decfsz temp1,f
goto _1mS
retlw 00
_5mS movlw .5
movwf temp2
nop
decfsz temp1,f
goto $-2
decfsz temp2,f
goto $-4
retlw 00
_10mS movlw 0Ah
movwf temp2
nop
decfsz temp1,f
goto $-2
decfsz temp2,f
goto $-4
retlw 00
_15mS movlw .15
movwf temp2
nop
decfsz temp1,f
goto $-2
decfsz temp2,f
goto $-4
retlw 00
_18mS movlw .18
movwf temp2
nop
decfsz temp1,f
goto $-2
decfsz temp2,f
goto $-4
retlw 00
_50mS movlw .50
movwf temp2
nop
decfsz temp1,f
goto $-2
decfsz temp2,f
goto $-4
retlw 00
_100mS movlw .100
movwf temp2
nop
decfsz temp1,f
goto $-2
decfsz temp2,f
goto $-4
retlw 00
_200mS movlw .200
movwf temp2
nop
decfsz temp1,f
goto $-2
decfsz temp2,f
goto $-4
retlw 00
;delay to create value for pot for speed
PotDel movlw 040h ;40h produces 12 loops
movwf temp1
decfsz temp1,f
goto $-1
retlw 00
;***************************
; Sub Routines *
;***************************
;position of pot creates a value in PotValue
Pot bsf status,rp0
bcf trisio,0 ;Make GP0 output
bcf status,rp0
bcf gpio,0 ;make GP0 LOW
call _1mS ;create delay to discharge 100n
bsf status,rp0
bsf trisio,0 ;Make GP0 input
bcf status,rp0
clrf PotValue
call PotDel
incf PotValue,f
btfss gpio,0 ;is input HIGH?
goto $-3
retlw 00 ;returns with a value in PotValue
;******************
;* Main *
;******************
Main clrf gpio
bcf gpio,5 ;gpio,5 high for a short time
call _1mS
bsf gpio,5
nop
btfss gpio,3
goto $+2
goto $+6 ;go to half step Forward
clrf gpio
bsf gpio,1
btfss gpio,3
goto Reverse ;go to half step Reverse
goto _FS ;go to Full Step - for forward or reverse
btfsc Sw_Flag,0
goto _1HSF_
btfsc Sw_Flag,1
goto _2HSF_
btfsc Sw_Flag,2
goto _3HSF_
btfsc Sw_Flag,3
goto _4HSF_
btfsc Sw_Flag,4
goto _5HSF_
btfsc Sw_Flag,5
goto _6HSF_
btfsc Sw_Flag,6
goto _7HSF_
goto _8HSF_
_1HSF_ movlw b'00100000' ;1
goto _C
_2HSF_ movlw b'00110000' ;2
goto _C
_3HSF_ movlw b'00010000' ;3
goto _C
_4HSF_ movlw b'00010100' ;4
goto _C
_5HSF_ movlw b'00000100' ;5
goto _C
_6HSF_ movlw b'00000110' ;6
goto _C
_7HSF_ movlw b'00000010' ;7
goto _C
_8HSF_ movlw b'00100010' ;8
movwf gpio
call _200mS
clrf gpio
call _200mS
call _200mS
clrf Sw_Flag
incf Sw_Flag,1
bsf gpio,5
nop
btfsc gpio,3 ;see if sw is still pressed for full speed
goto HS_Fwd
bcf gpio,5
goto Main
_C movwf gpio
call _200mS
clrf gpio
call _200mS
call _200mS
bcf status,0 ;clear the carry
rlf Sw_Flag,1
bsf gpio,5
nop
btfsc gpio,3 ;see if sw is still pressed for full speed
goto HS_Fwd
bcf gpio,5
goto Main
;reverse - half step
Reverse
clrf gpio
bcf gpio,4 ;gpio,4 high for a short time
call _1mS
bsf gpio,4
nop
btfss gpio,3
goto Main
btfsc Sw_Flag,0
goto _1HSR_
btfsc Sw_Flag,1
goto _2HSR_
btfsc Sw_Flag,2
goto _3HSR_
btfsc Sw_Flag,3
goto _4HSR_
btfsc Sw_Flag,4
goto _5HSR_
btfsc Sw_Flag,5
goto _6HSR_
btfsc Sw_Flag,6
goto _7HSR_
goto _8HSR_
_1HSR_ movlw b'00100000' ;1
movwf gpio
call _200mS
clrf gpio
call _200mS
call _200mS
Movlw 80h
movwf Sw_Flag
bsf gpio,4
nop
btfsc gpio,3 ;see if sw is still pressed for full speed
goto HS_Rev
bcf gpio,4
goto Main
_2HSR_ movlw b'00110000' ;2
goto _D
_3HSR_ movlw b'00010000' ;3
goto _D
_4HSR_ movlw b'00010100' ;4
goto _D
_5HSR_ movlw b'00000100' ;5
goto _D
_6HSR_ movlw b'00000110' ;6
goto _D
_7HSR_ movlw b'00000010' ;7
goto _D
_8HSR_ movlw b'00100010' ;8
goto _D
_D movwf gpio
call _200mS
clrf gpio
call _200mS
call _200mS
bcf status,0 ;clear the carry
rrf Sw_Flag,1
bsf gpio,4
nop
btfsc gpio,3 ;see if sw is still pressed for full speed
goto HS_Rev
bcf gpio,4
goto Main
;half step forward
HS_Fwd
clrf gpio
bcf gpio,5 ;gpio,5 high for a short time
call _1mS
bsf gpio,5
nop
btfss gpio,3
goto Main
btfsc Sw_Flag,0
goto _1HSF
btfsc Sw_Flag,1
goto _2HSF
btfsc Sw_Flag,2
goto _3HSF
btfsc Sw_Flag,3
goto _4HSF
btfsc Sw_Flag,4
goto _5HSF
btfsc Sw_Flag,5
goto _6HSF
btfsc Sw_Flag,6
goto _7HSF
goto _8HSF
_1HSF movlw b'00100000' ;1
goto _CC
_2HSF movlw b'00110000' ;2
goto _CC
_3HSF movlw b'00010000' ;3
goto _CC
_4HSF movlw b'00010100' ;4
goto _CC
_5HSF movlw b'00000100' ;5
goto _CC
_6HSF movlw b'00000110' ;6
goto _CC
_7HSF movlw b'00000010' ;7
goto _CC
_8HSF movlw b'00100010' ;8
movwf gpio
call _5mS
clrf gpio
clrf Sw_Flag
incf Sw_Flag,1
goto HS_Fwd
_CC movwf gpio
call _5mS
clrf gpio
bcf status,0 ;clear the carry
rlf Sw_Flag,1
goto HS_Fwd
;half step reverse
HS_Rev
clrf gpio
bcf gpio,4 ;gpio,4 high for a short time
call _1mS
bsf gpio,4
nop
btfss gpio,3
goto Main
btfsc Sw_Flag,0
goto _1HSR
btfsc Sw_Flag,1
goto _2HSR
btfsc Sw_Flag,2
goto _3HSR
btfsc Sw_Flag,3
goto _4HSR
btfsc Sw_Flag,4
goto _5HSR
btfsc Sw_Flag,5
goto _6HSR
btfsc Sw_Flag,6
goto _7HSR
goto _8HSR
_1HSR movlw b'00100000' ;1
movwf gpio
call _10mS
clrf gpio
Movlw 80h
movwf Sw_Flag
goto HS_Rev
_2HSR movlw b'00110000' ;2
goto _G
_3HSR movlw b'00010000' ;3
goto _G
_4HSR movlw b'00010100' ;4
goto _G
_5HSR movlw b'00000100' ;5
goto _G
_6HSR movlw b'00000110' ;6
goto _G
_7HSR movlw b'00000010' ;7
goto _G
_8HSR movlw b'00100010' ;8
goto _G
_G movwf gpio
call _10mS
clrf gpio
bcf status,0 ;clear the carry
rrf Sw_Flag,1
goto HS_Rev
;decide on full step forward or reverse
_FS clrf gpio
bsf gpio,5
btfss gpio,3
goto $+2
goto FS_Fwd
bsf gpio,4
btfss gpio,3
goto $+2
goto FS_Rev
clrf gpio
call _1mS
goto $-10
;Full Step Forward
FS_Fwd call pot ;returns with value in PotValue
movlw .50
movwf look ;look at pot every 50 loops
movlw b'00000010' ;full step forward
movwf gpio
movf PotValue,w
movwf loops
call _1mS
decfsz loops,1
goto $-2
movlw b'00000100'
movwf gpio
movf PotValue,w
movwf loops
call _1mS
decfsz loops,1
goto $-2
movlw b'00010000'
movwf gpio
movf PotValue,w
movwf loops
call _1mS
decfsz loops,1
goto $-2
movlw b'00100000'
movwf gpio
movf PotValue,w
movwf loops
call _1mS
decfsz loops,1
goto $-2
decfsz look,1
goto FS_Fwd+3 ;don't look at pot
goto FS_Fwd ;look at pot
;Full Step Reverse
FS_Rev call pot ;returns with value in PotValue
movlw .50
movwf look ;look at pot every 50 loops
movlw b'00100000' ;full step reverse
movwf gpio
movf PotValue,w
movwf loops
call _1mS
decfsz loops,1
goto $-2
movlw b'00010000'
movwf gpio
movf PotValue,w
movwf loops
call _1mS
decfsz loops,1
goto $-2
movlw b'00000100'
movwf gpio
movf PotValue,w
movwf loops
call _1mS
decfsz loops,1
goto $-2
movlw b'00000010'
movwf gpio
movf PotValue,w
movwf loops
call _1mS
decfsz loops,1
goto $-2
decfsz look,1
goto FS_Rev+3 ;don't look at pot
goto FS_Rev ;look at pot
END
GOING
FURTHER
You can add additional features to this
project by writing your own program or modifying the program above.
Parts List
Cost:
au$25.00
plus postage
Kits
are available
1 - 39R SM resistor>
4 - 100R SM resistor
1 - 220R SM resistor
3 - 2k2 SM resistor
1 - 47k SM resistor
1 - 100k pot
2 - 100n SM capacitors
1 - 100u electrolytic
4 - SM yellow LEDs
1 - SM diode
4 - BD679 transistors
1 - 78L05 SM voltage regulator
1 - SPDT mini slide switch
3 - mini tactile buttons
1 - 8 pin IC socket
1 - 5 pin header
40cm fine enamelled wire
20cm fine tinned copper wire
20cm - very fine solder
1 - PIC12F629 chip (with
Step routine)
1 - 4-cell battery holder
1 - battery snap
1 - Prototype PC board